
發(fā)布時間:2020-07-21
相機標(biāo)定(Calibration),是指利用相機成像系統(tǒng)的數(shù)學(xué)模型,計算出世界坐標(biāo)系與相機圖像坐標(biāo)系對應(yīng)關(guān)系的過程。標(biāo)定通常應(yīng)用于機器視覺高精度測量系統(tǒng)、運動控制系統(tǒng)中,標(biāo)定算法的穩(wěn)定性及精度將直接影響測量與定位的準(zhǔn)確性。
靈閃IntelliBlink在不斷追求標(biāo)定算法高速高精度的同時,又充分考慮了標(biāo)定應(yīng)用場景的多樣性及復(fù)雜性,集成了四點標(biāo)定、九點標(biāo)定、網(wǎng)格標(biāo)定、標(biāo)量轉(zhuǎn)換、分散型網(wǎng)格標(biāo)定、聯(lián)合標(biāo)定等標(biāo)定方式,幫助用戶快速完成標(biāo)定。
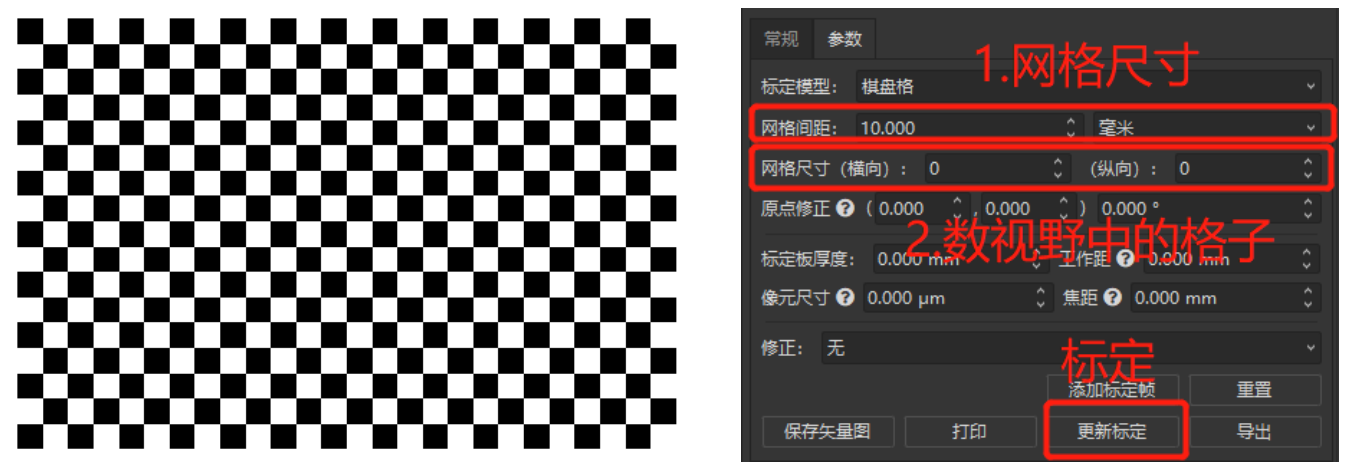
圖1 傳統(tǒng)的棋盤格標(biāo)定
通過市場需求的調(diào)研,我們發(fā)現(xiàn)圖1中傳統(tǒng)棋盤格標(biāo)定的流程比較復(fù)雜,用戶除了需要知道網(wǎng)格的尺寸以外,還要通過數(shù)的方式確定在相機視野中的網(wǎng)格數(shù)量來完成標(biāo)定,如果實際應(yīng)用場景中網(wǎng)格間距尺寸比較小,用戶很可能數(shù)錯導(dǎo)致最后標(biāo)定失敗。
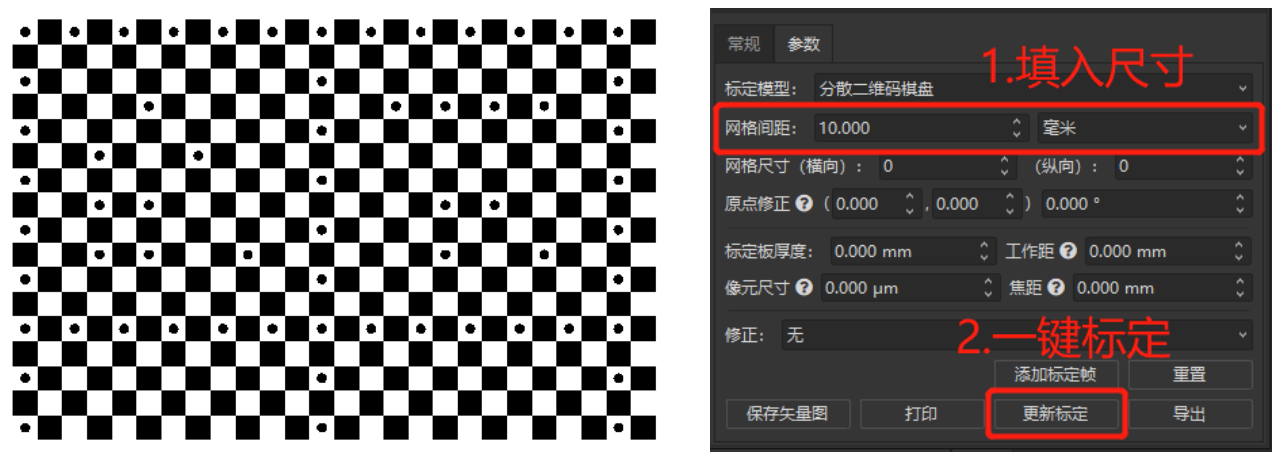
圖2 分散型網(wǎng)格標(biāo)定
在實際應(yīng)用場景中,用戶會遇到計算兩個特征點間距的需求,但是由于特征點間距過大,精度要求過高,為了降低成本只能使用兩個相機分別進(jìn)行定位,然后通過數(shù)據(jù)計算給出兩個特征點的實際距離,這時候必須要用到聯(lián)合標(biāo)定。
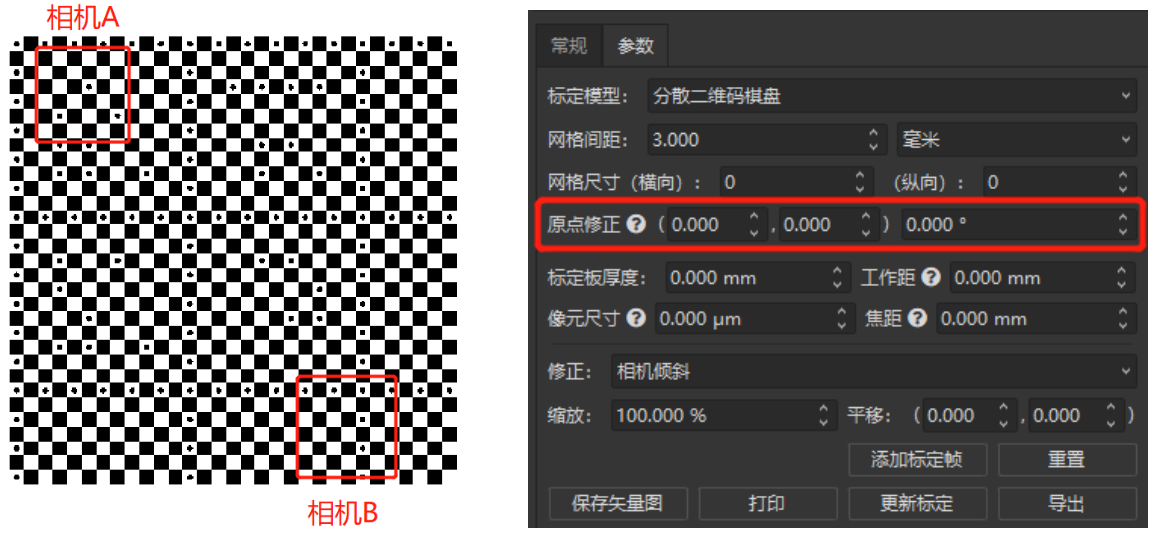
圖3 聯(lián)合標(biāo)定
如上圖所示,用戶通過輸入網(wǎng)格間距、尺寸、原點修正等信息,可以將多個相機標(biāo)定在同一坐標(biāo)系內(nèi),實現(xiàn)多個相機的聯(lián)合標(biāo)定,從而計算出兩個相機內(nèi)任意兩點或者其他特征的距離。
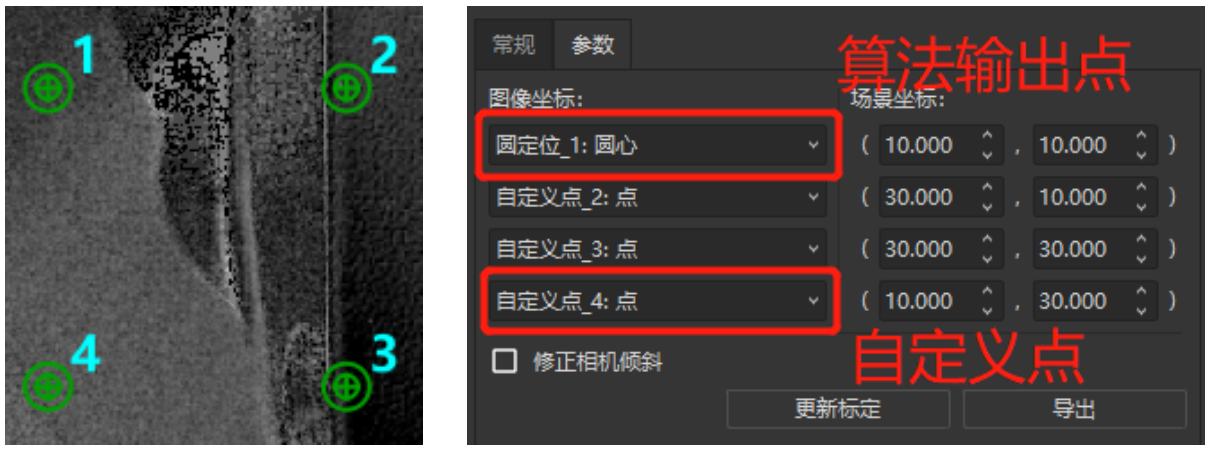
圖4 多點標(biāo)定
在很多尺寸測量的應(yīng)用場景中,用戶可以根據(jù)圖像上像素的長度,對應(yīng)標(biāo)準(zhǔn)產(chǎn)品實際的長度,直接計算出一個縮放比例關(guān)系,用戶無需進(jìn)行標(biāo)準(zhǔn)的標(biāo)定流程。這種標(biāo)定方式通常用于視覺測量的場景。
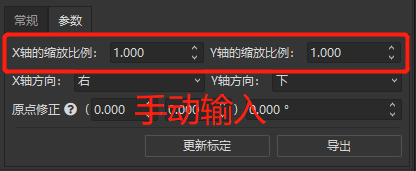

圖5 標(biāo)量轉(zhuǎn)換標(biāo)定
除此之外,相機鏡頭的畸變,以及現(xiàn)場相機安裝時的傾斜,都可以通過靈閃中的矯正算法進(jìn)行一鍵修正,降低了用戶的選型與調(diào)試要求。
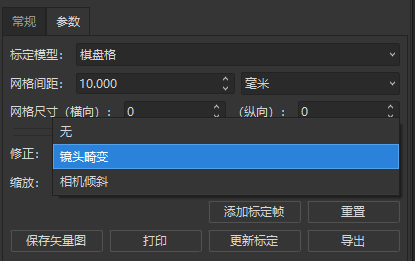
圖6 矯正算法
用戶可以在靈閃中根據(jù)需求輸入網(wǎng)格尺寸,直接保存矢量圖或者打印圖紙。

網(wǎng)格打印工具
應(yīng)用案例-點膠
精度要求:0.01mm
 浙公網(wǎng)安備 33018502001926號
浙公網(wǎng)安備 33018502001926號
